CS機器人與第3方力傳感器適配
簡介:
CS機械臂除F系列標(biāo)配力控傳感器外,也可以通過第3方力控傳感器來實現(xiàn),比如:鑫精誠,藍點,坤維,宇立(走末端RS485通訊)。以下文章講解如何使用外部傳感器,快速適配各種參數(shù),以及解決各種經(jīng)常遇到的問題。
1. 操作步驟
1.1 安裝力控傳感器
1. 將第三方力控傳感器安裝在我們的機械臂末端法蘭上面,連接末端航插。
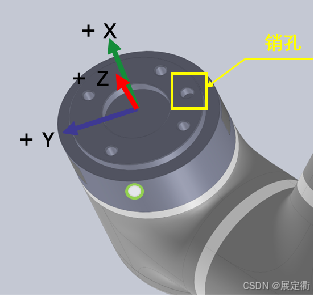
2. 注意安裝方向,力控傳感器的X,Y,Z方向要與機械臂的工具坐標(biāo)系方向一致,可以參考下圖確認安裝方向
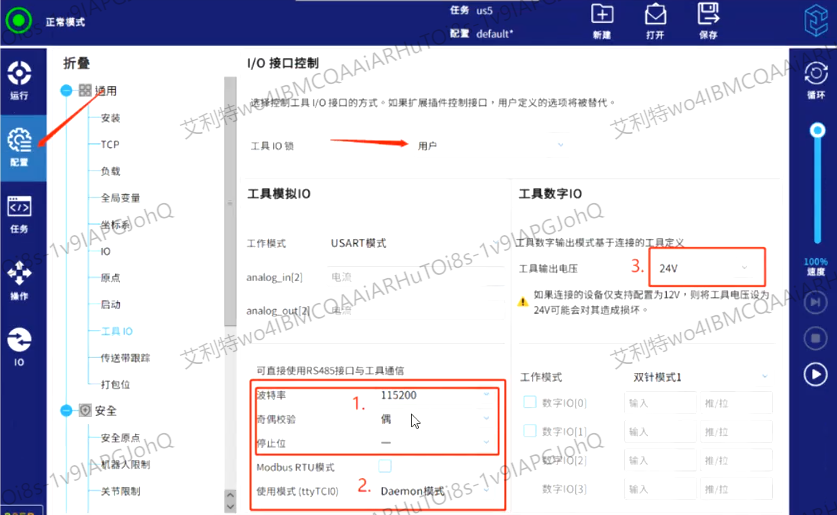
3. 安裝好后設(shè)置工具IO的參數(shù),工具輸出電壓,波特率,奇偶校驗,以及使用模式,不同品牌的力控傳感器參數(shù)設(shè)置不同,這個需要注意。如下圖:

1.2 安裝插件
再安裝力傳感器監(jiān)視插件SensorAdapter(插件文件可向艾利特工程師索取),如下圖:
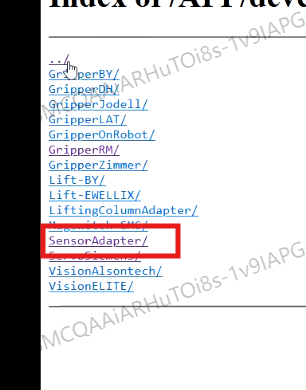
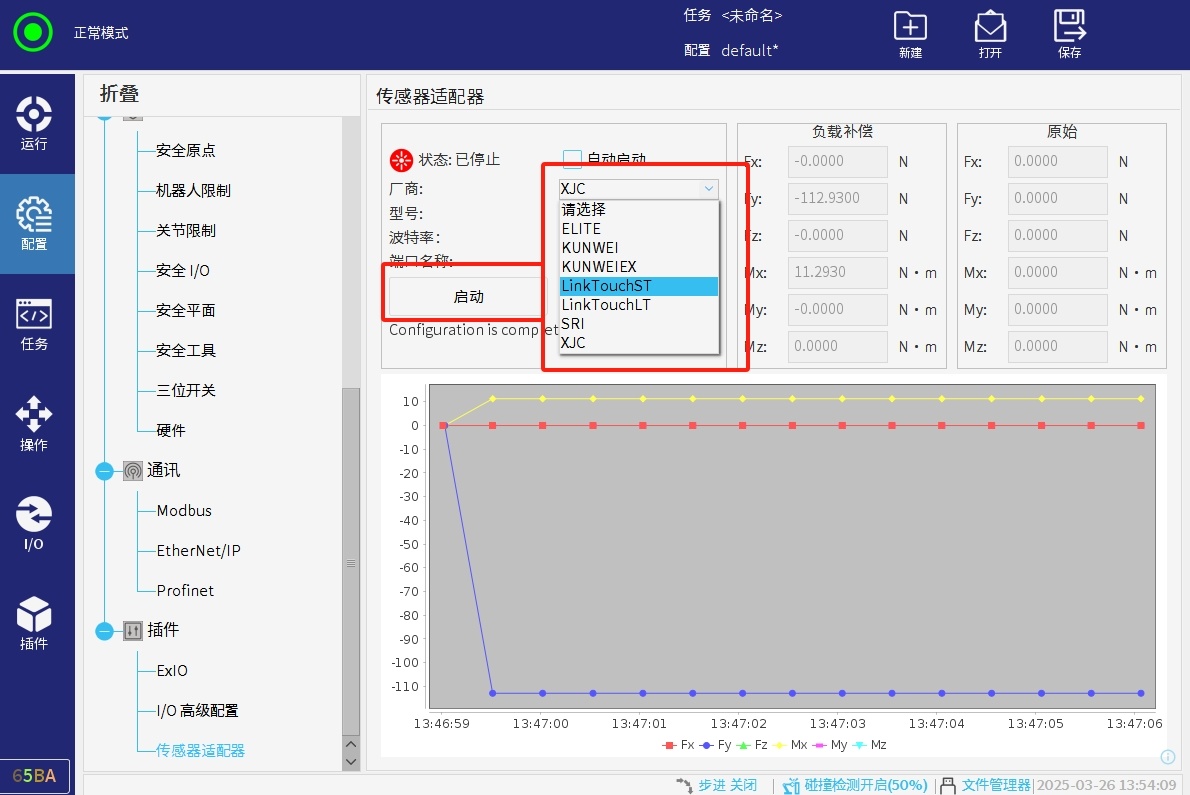
安裝好插件后,打開插件,選擇對應(yīng)傳感器的名稱 ,點擊啟動
1.3 打開插件,檢查力控數(shù)據(jù)
打開力控插件后,需檢查一下負載補償與原始數(shù)據(jù),是否正常,如果不正常,需要做力傳感器標(biāo)定。也可以稍微給力傳感器外部施加力,檢查負載補償是否有數(shù)據(jù),如果沒有數(shù)據(jù),也是說明不正常。

1.4 力傳感器空載標(biāo)定
1. 檢查負載設(shè)置是否為0,將負載設(shè)置為0后,末端工裝夾具也要拆下來,只帶力控傳感器。
2. 關(guān)閉鎖軸拖動功能。
3. 檢查機械臂周圍是否有干擾物品,防止之后空載標(biāo)定的時候出現(xiàn)碰撞。
4. 建議速度不要設(shè)置太快,推薦30%。
5. 進入開發(fā)者模式,點擊力傳感器空載標(biāo)定,機械臂標(biāo)定的時候會以固定軌跡運行,等運行結(jié)束,會提示標(biāo)定結(jié)束。

6. 標(biāo)定結(jié)束后再次檢查負載補償與原始參數(shù)。如果都趨近于0,說明標(biāo)定成功。
1.5 打開拖動界面,選擇模式
打開拖動界面,選擇拖動限制,僅平面,僅旋轉(zhuǎn),無約束。

2. 鎖軸拖動阻尼設(shè)置
2.1 平動阻尼
平動阻尼就是機械臂在力控模式下,朝X,Y,Z方向水平拖動時候的阻力,參數(shù)越大,拖動起來越費力。
多用在力控傳感器的末端的工裝接觸到桌面會回彈的現(xiàn)象。將平動阻尼調(diào)大,就不會回彈了。
2.2 旋轉(zhuǎn)阻尼
旋轉(zhuǎn)阻尼就是機械臂在力控模式下拖動,手腕關(guān)節(jié)朝RX,RY,RZ方向旋轉(zhuǎn)的阻力,參數(shù)越大,力控拖動越費力。

3. 力傳感器碰撞檢測
該功能需要打開力控插件,才能設(shè)置該參數(shù),用戶可以自定義碰撞力閾值,當(dāng)力傳感器末端如果感受到相應(yīng)反方向的閾值的力,機械臂就會停止。
需要注意的是,如果在打開鎖軸拖動功能的前提下進行傳感器空載標(biāo)定的時候,需要把這個功能關(guān)閉,不然無法標(biāo)定。

4. 負載辨識
4.1 操作步驟
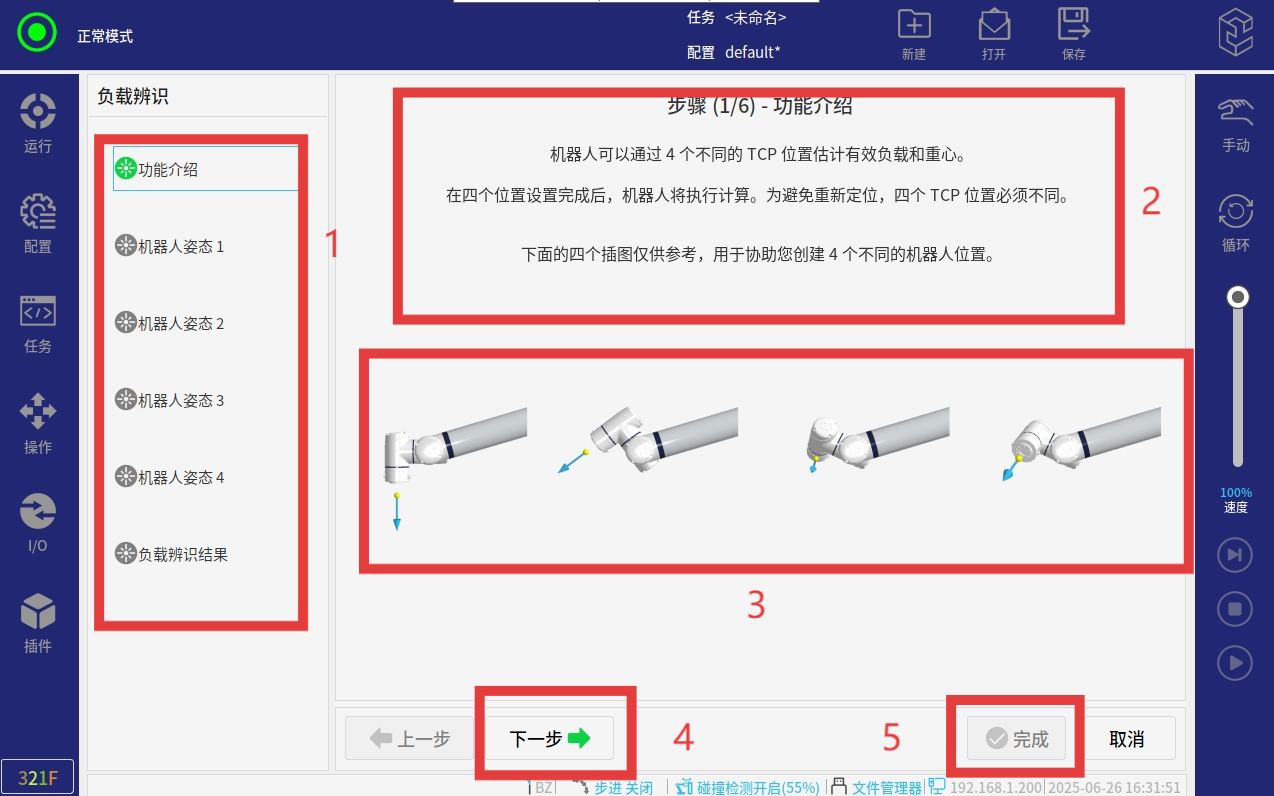
1. 打開力控傳感器適配器

2. 選擇負載---負載辨識

3. 按照下圖中所示機械臂位姿,設(shè)置4個不同的點位,設(shè)置好后點擊完成即可。